Attack-Resilient Observer Pruning for Path-Tracking Control of Wheeled Mobile Robot
Abstract
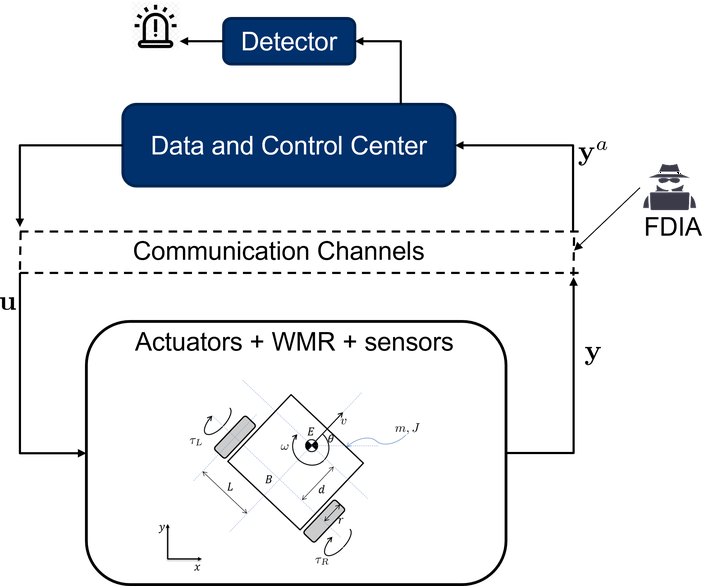
Path-tracking control of wheeled mobile robot (WMR) has gained a lot of research attention, primarily because of its wide applicability — for example intelligent wheelchairs, exploration-assistant remote WMR. Recent increase in remote and autonomous operations/requirements for WMR has led to more and more use of IoT devices within the control loop. Consequently, providing interfaces for malicious interactions through false data injection attacks (FDIA). Moreover, optimization-based FDIAs have been shown to cause catastrophic consequences in feedback control systems while by-passing any residual-based monitoring system. Since these attacks target system measurement process, this paper focuses on the problem of improving the resiliency of dynamical observers against FDIA. Specifically, we propose an attack-resilient pruning algorithm which attempts to exclude compromised channels from being processed by the observer. The proposed pruning algorithm improves attack-localization precision to 100% with high probability, which correspondingly improves the resiliency of the underlying UKF to FDIA. The improvements due to the developed resilient pruning-based observer is validated through a numerical simulation of a two-layer path-tracking control platform of differential-driven wheeled mobile robot (DDWMR) under FDIA.
Yu Zheng
Ph.D. Candidate
My research interests include concurrent learning, and resilient control and estimation design for cyber-physical systems and autonomous systems